\color{#3498db}\bf[upd2021.03.19]
Part -999 感谢列表
(排名不分先后)
- 计算几何「OI-Wiki」
- 数论小白都能看懂的平面凸包详解 「ShineEternal的博客」
- 几何画图「GeoGebra」 离线版
- 感谢@rui_er 指出了一个错误
- 感谢@MicroMaker hack,指出了错误
Part 1 前言
限于笔者能力有限,本学习笔记如有错误,并非有意,非常欢迎指出。
$\color{#3498db}\footnotesize\bf[upd2021.03.21]$ $\footnotesize\color{red}\textsf{\textbf{作者在 Firefox,Chrome,Edge 均已测试图片无任何问题。}}
Part 2 何为计算几何
学二维凸包,我们首先需要了解的就是计算几何。
计算几何,就是利用计算机建立数学模型解决几何问题。
要用电脑解几何题?数学好的同学们笑了。
我们并不是用计算机算数学卷子上的几何题去了,而是解决一些更加复杂的几何相关问题。
为了解决复杂且抽象的问题,我们一定要选择合适的研究方法。对于计算机来说,给它看几何图形……
Part 3 二维凸包
Part 3.1 凸多边形
凸多边形是指所有内角大小都在 [0, \pi] 范围内的 简单多边形 。
Part 3.2 凸包
「
在平面上能包含所有给定点的最小凸多边形叫做凸包。
其定义为:对于给定集合 X ,所有包含 X 的凸集的交集 S 被称为 X 的 凸包 。
」
其实我们可以把凸包看成一个拿橡皮筋围成的一个图形。
假设有一个布满小凸起的板子:
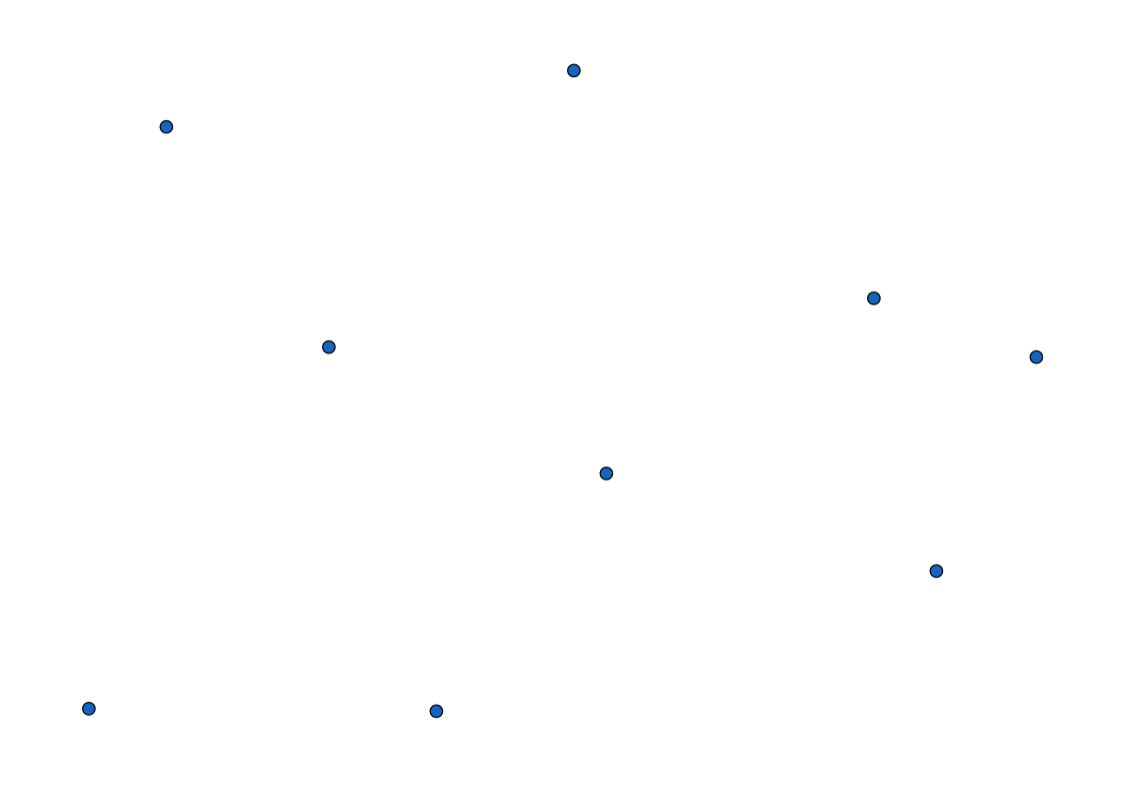
我们要把这些凸起都围起来,怎么围呢?
显然,最简单方便的方法是这样:
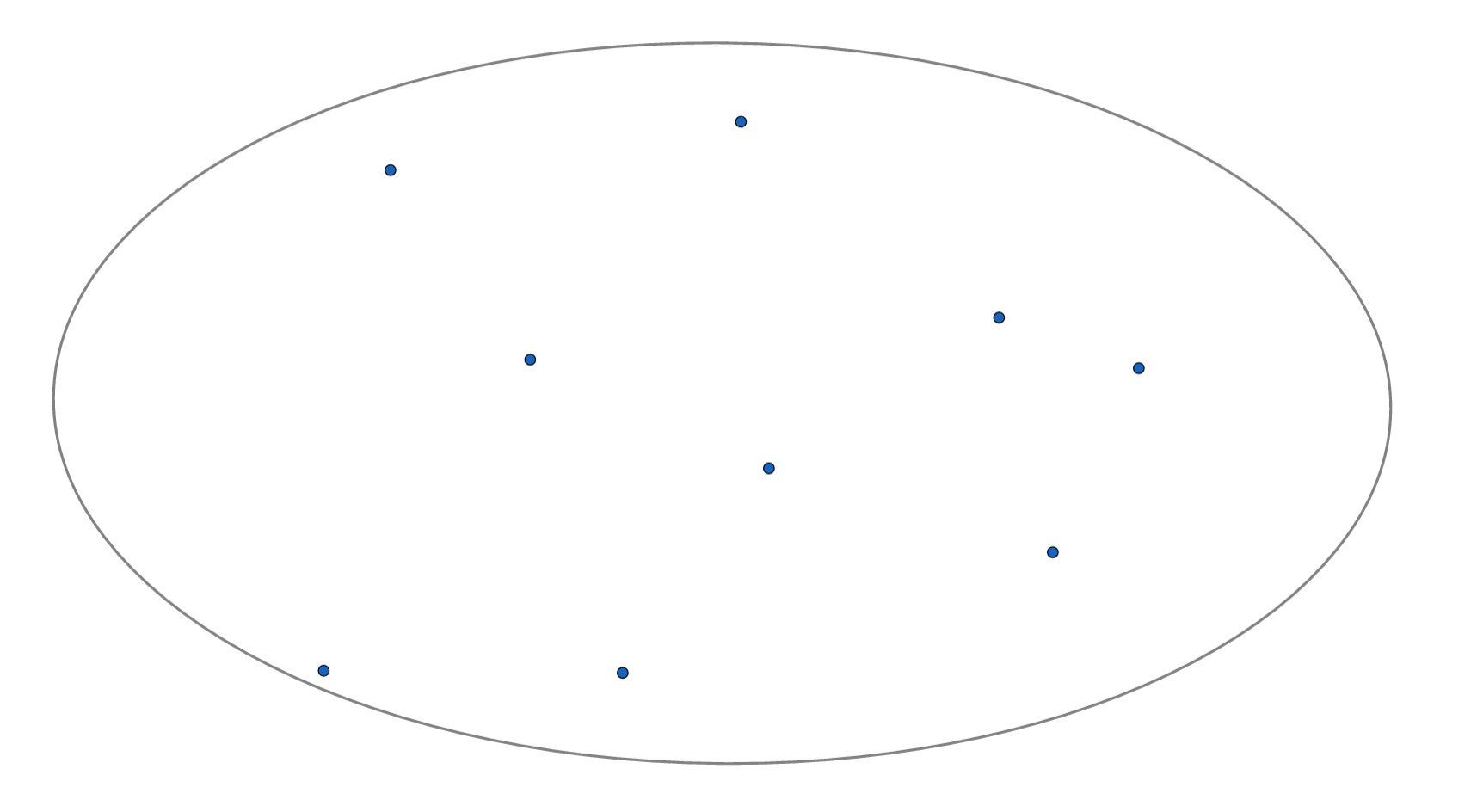
但是,我们知道,橡皮筋是有弹力的,所以橡皮筋会往里缩,直到这样:
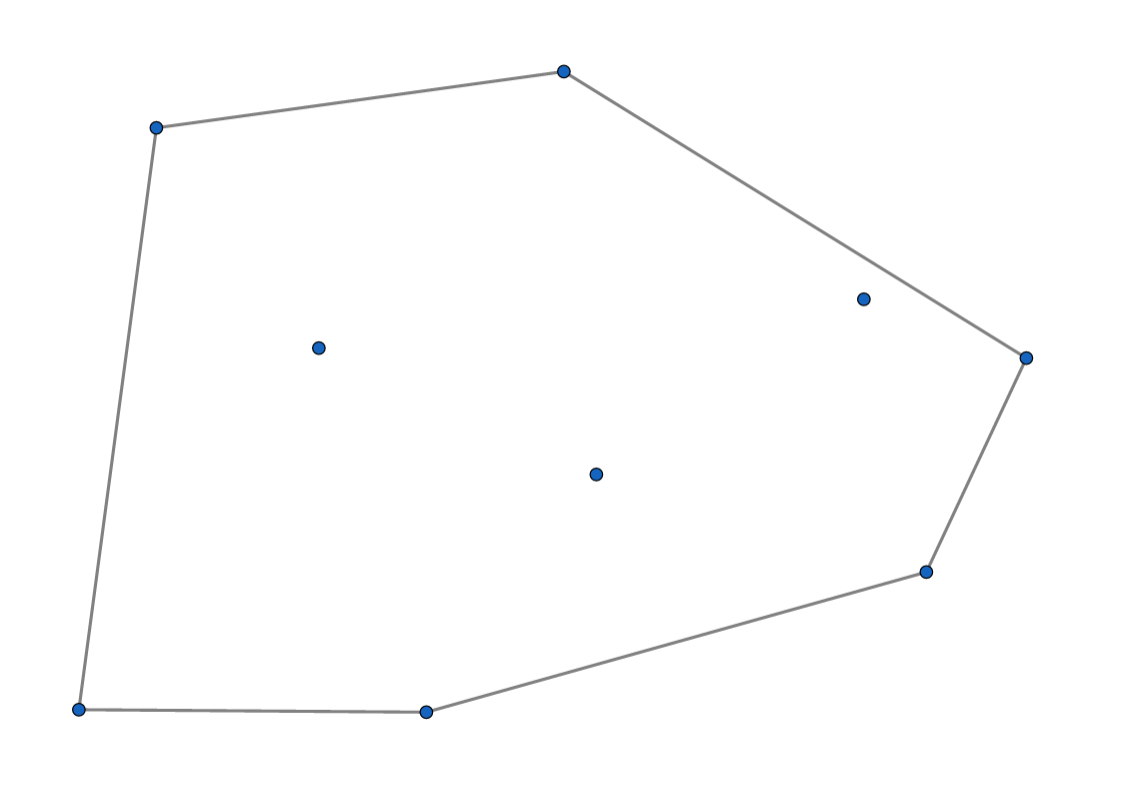
最外圈的凸起撑起了橡皮筋。
此时橡皮筋围成的多边形的顶点就是最外圈凸起所在的位置。
由此,我们就定义橡皮筋围成的图形为一个平面凸包。
那么,换一种定义,就为:
**平面凸包是指覆盖平面上 $n$ 个点的最小的凸多边形。**
当然,我们发现在程序中却无法模拟橡皮筋收缩的过程,于是有了下文的诞生。
### Part 3.3 二维凸包的求法
在这里我们只讲两种主要的也是最常用的二维凸包的求法。
#### Part 3.3.1 Graham 算法
Graham 算法的本质:
Graham 扫描算法维护一个凸壳,通过不断在凸壳中加入新的点和去除影响凸性的点,最后形成凸包。
凸壳:凸包的一部分。
此算法主要分为两部分:
- 排序
- 扫描
##### Part 3.3.1.1 排序
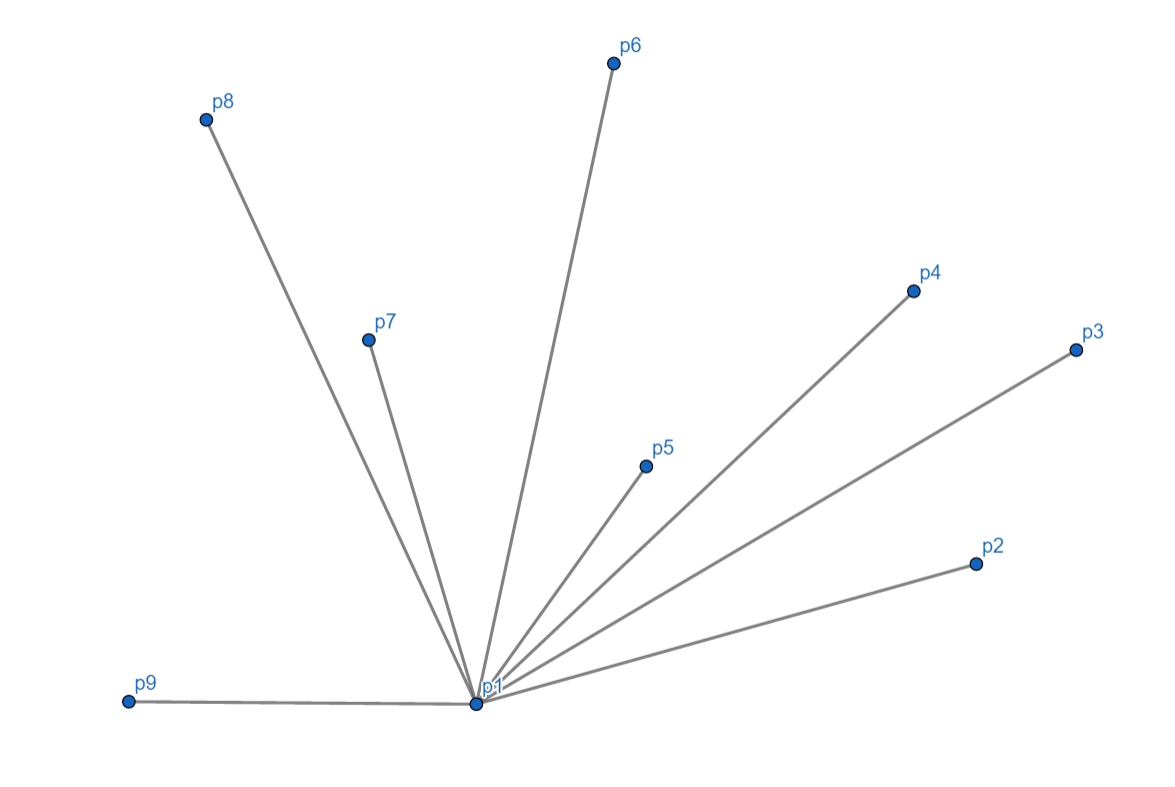
我们先选择一个 $y$ 最小的点(如 $y$ 相同选 $x$ 最小),记为 $p_1$。
剩下的点,按照极角的大小逆时针排序,记为 $p_2,p_3,\dots, p_m$。
##### Part 3.3.1.2 扫描
(下列所说的左右等是指以上一条连线为铅垂线,新的连线偏移的方向)
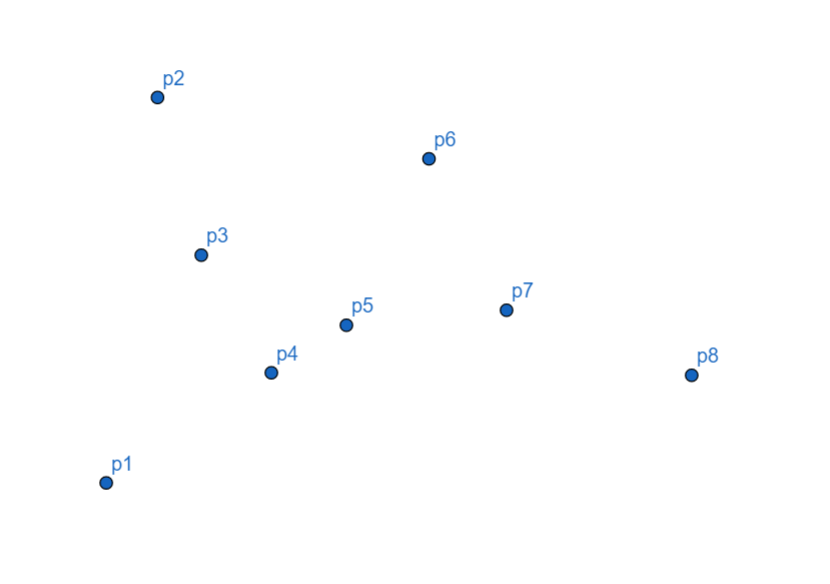
刚开始,我们的点集是这样的:
$p_1$ 为起始点。
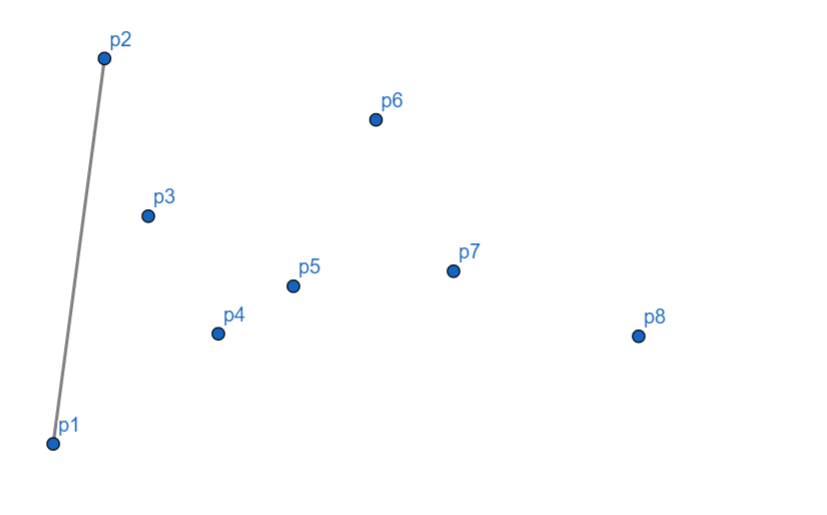
随后,$p_2$ 准备入栈,由于栈元素很少,所以可以入栈。
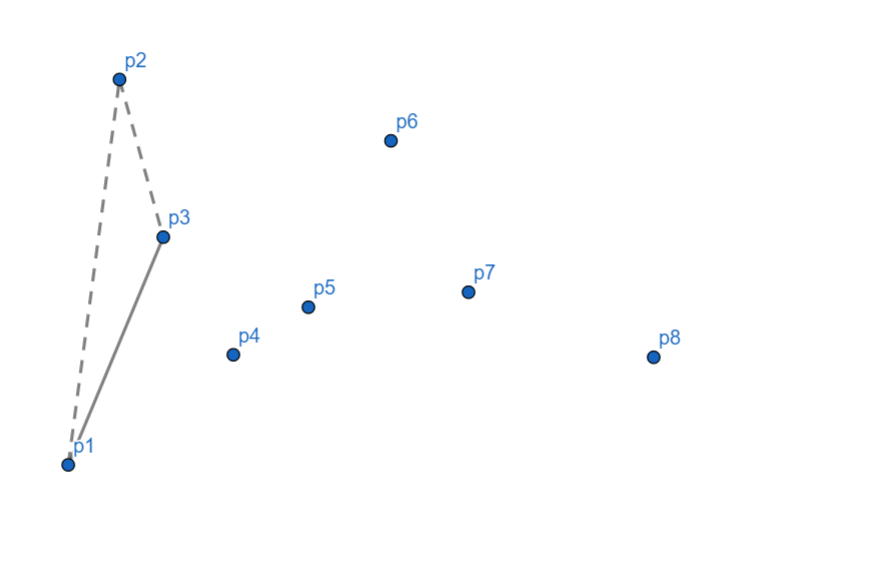
再看 $p_3$,因为 $p_3$ 向左,符合凸包条件,入栈。
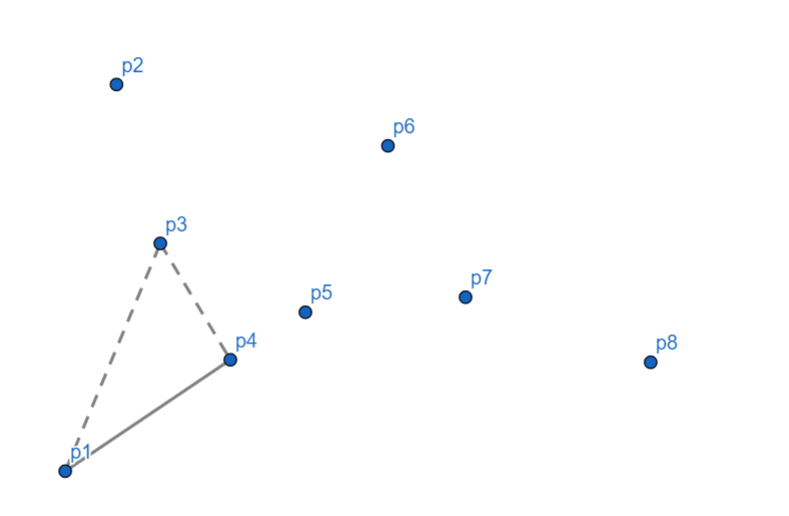
随后 $p_4$ 也一切正常,依然向左,入栈。
$p_5$ 依然向左,入栈。
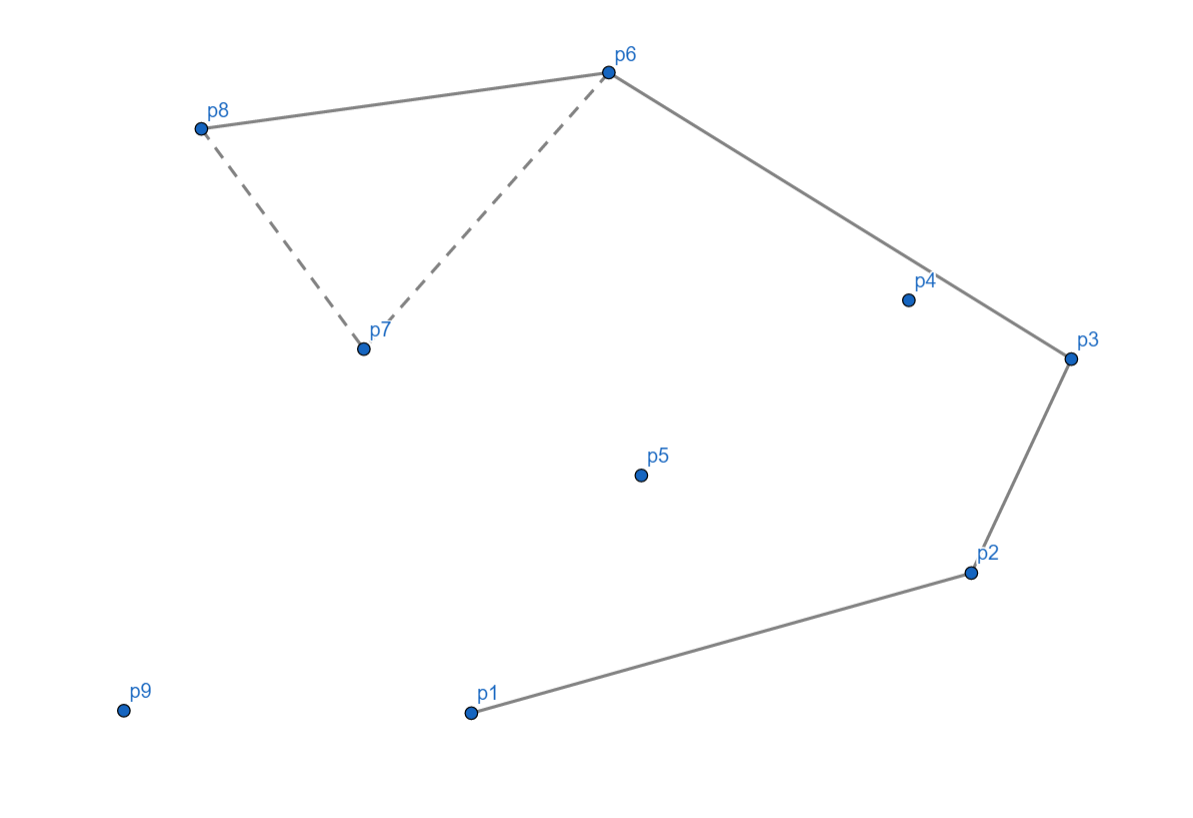
到 $p_6$ 时,我们发现了点问题,就是不再是向左了,而是向右了,所以我们此时要将 $p_5$ 出栈,$p_6$ 入栈。
入栈后,我们发现,相对于 $p_4$,$p_6$ 依然是向右的,所以我们还要把 $p_4$ 出栈,$p_6$ 入栈。
接下来 $p_7$ 没有问题。
$p_8$ 时,我们发现,也是向右的,所以将 $p_7$ 出栈,$p_8$ 入栈。
接下来 $p_9$ 正常,入栈。
最后,我们再把最后一个点和第一个点连起来。
此时,我们的 Graham 算法的全过程就结束了。
时间复杂度为 $O(n \log n)$。
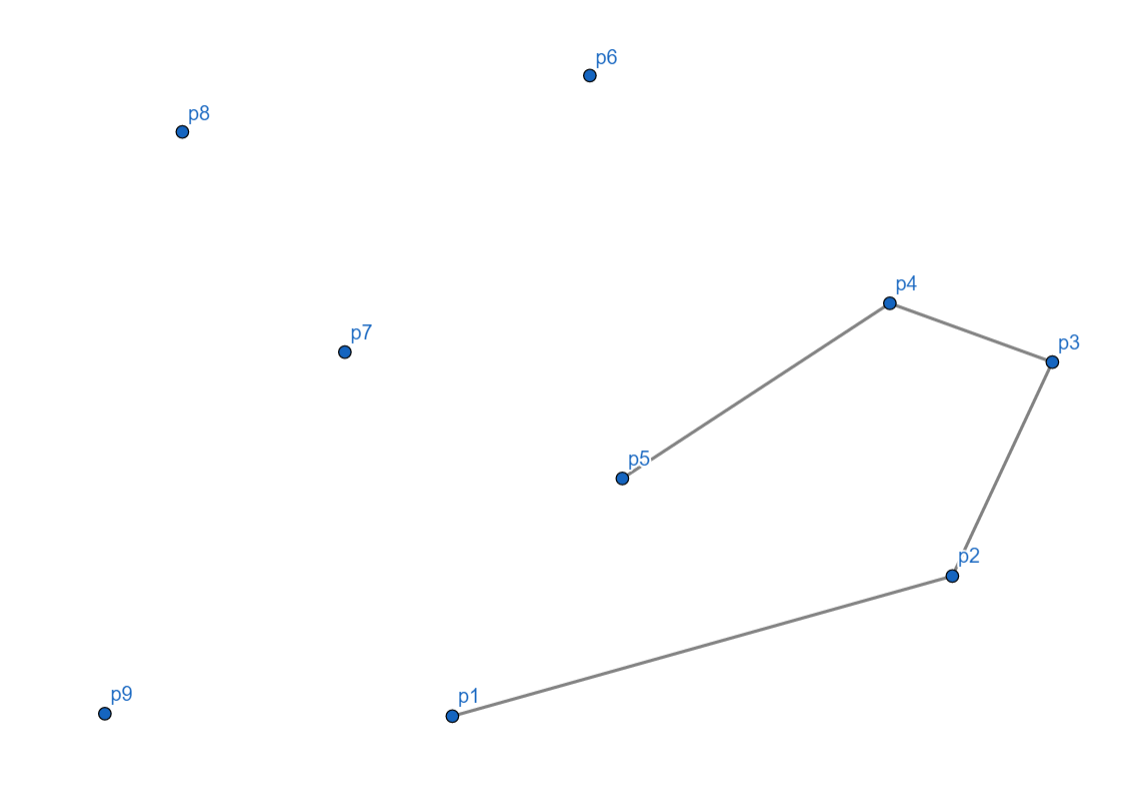
#### Part 3.3.2 Andrew 算法
Graham 算法的一种进阶。
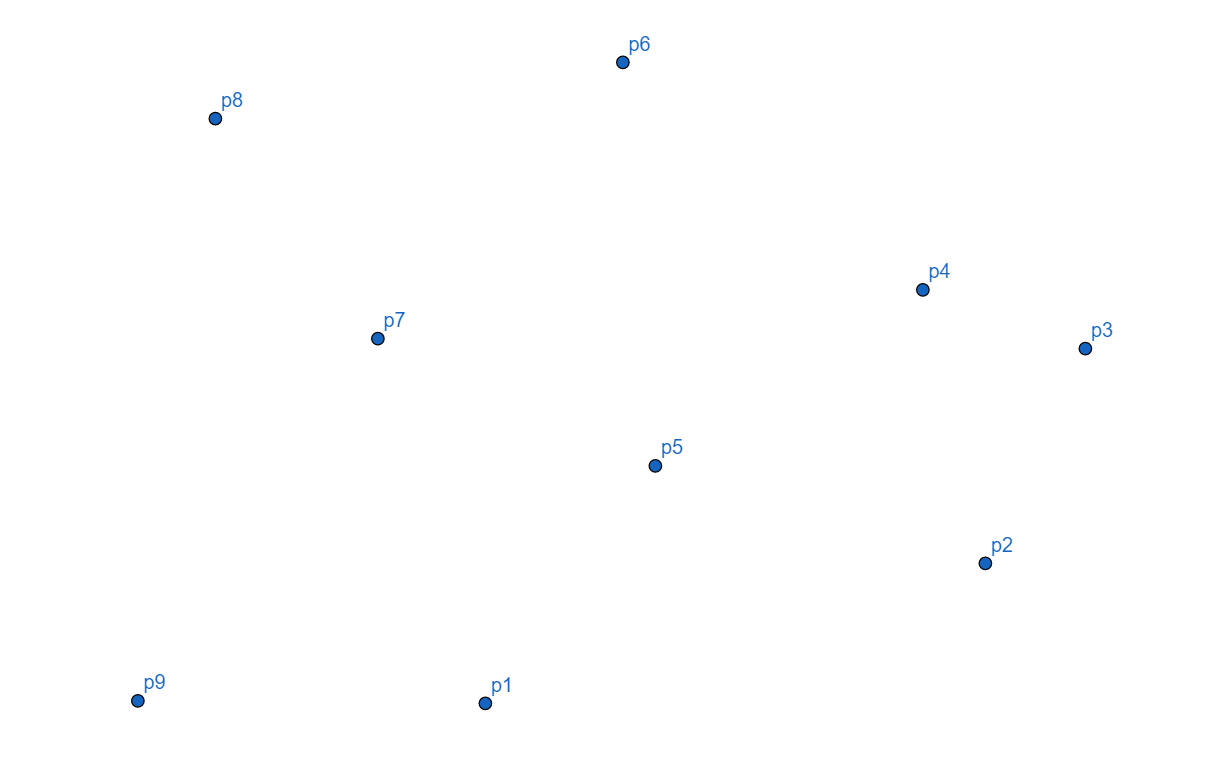
假设我们有这些点:
首先把所有点以横坐标为第一关键字,纵坐标为第二关键字排序。
相对于 Graham 算法来说,Andrew 算法排序更简单,按 $x, y$ 坐标排序,时间复杂度也更低(一般的坐标系中排序方法)。
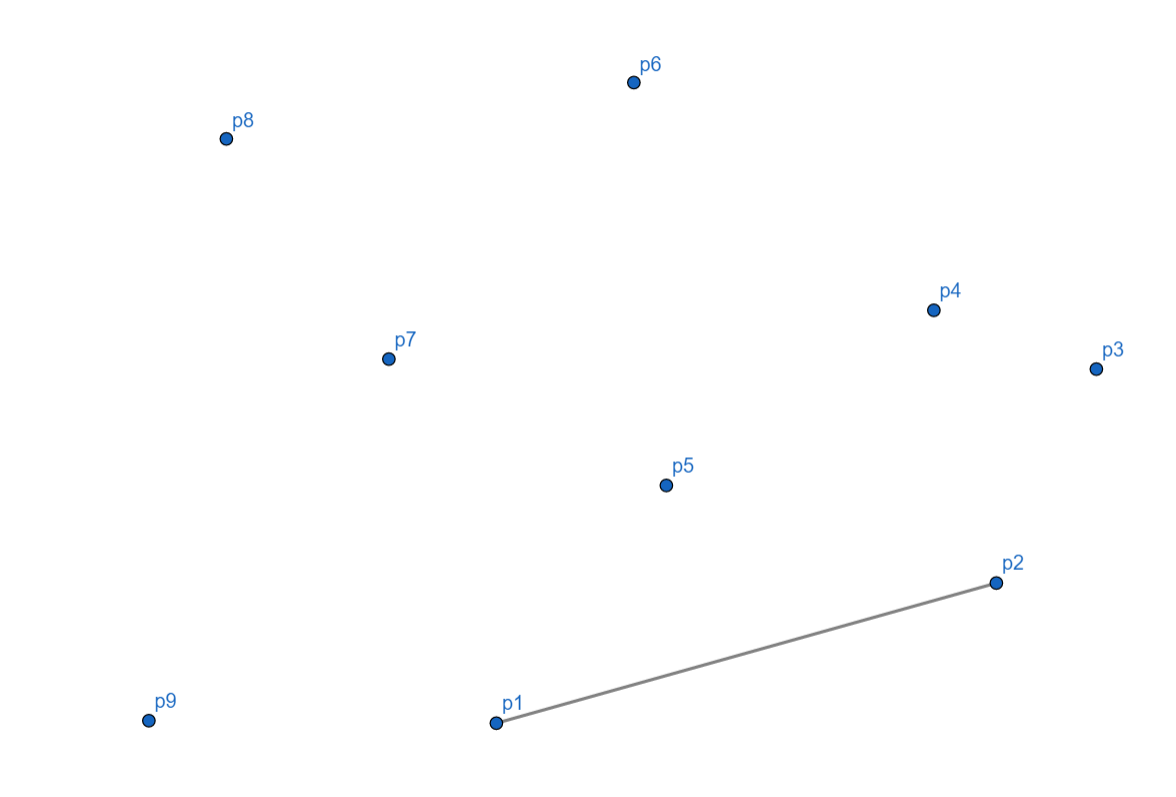
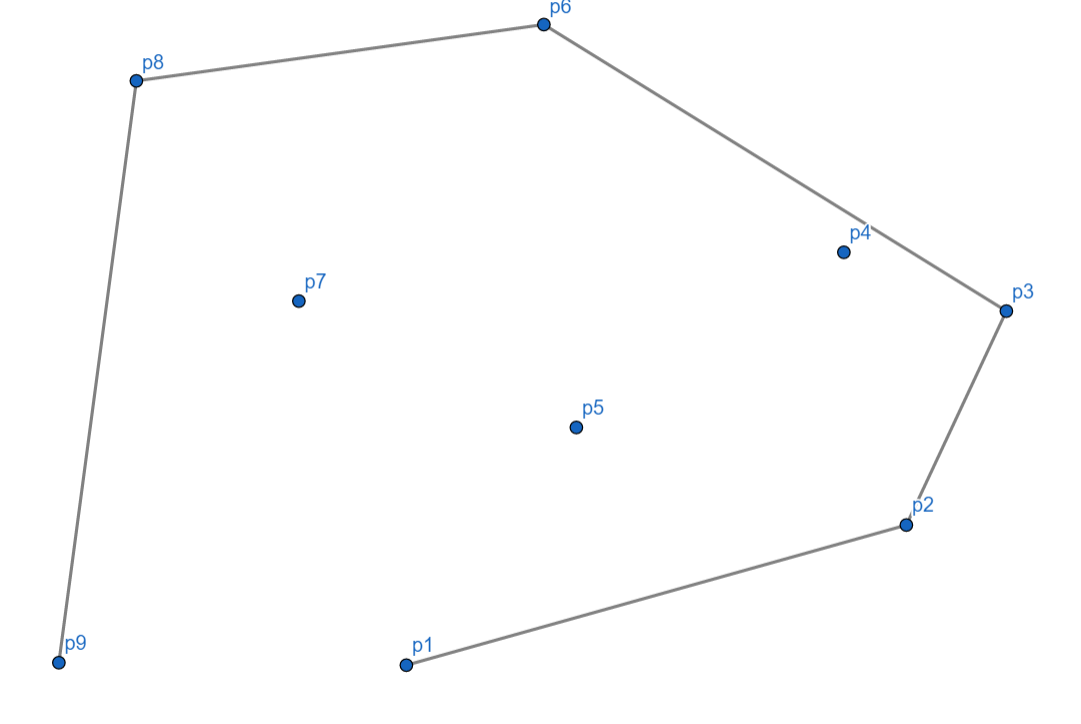
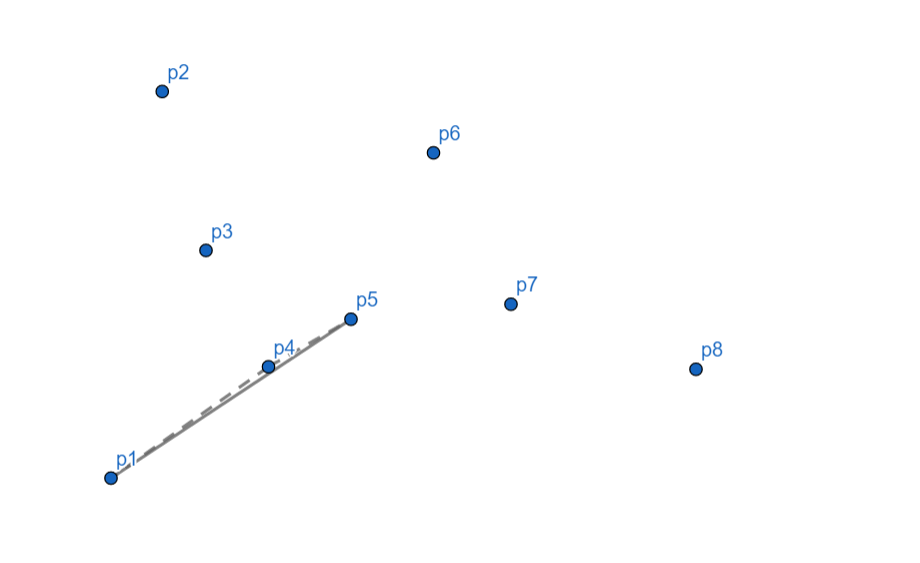
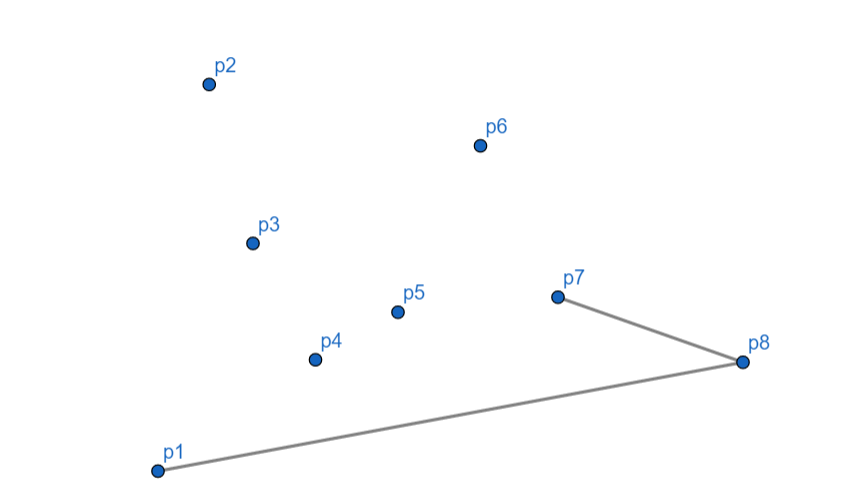
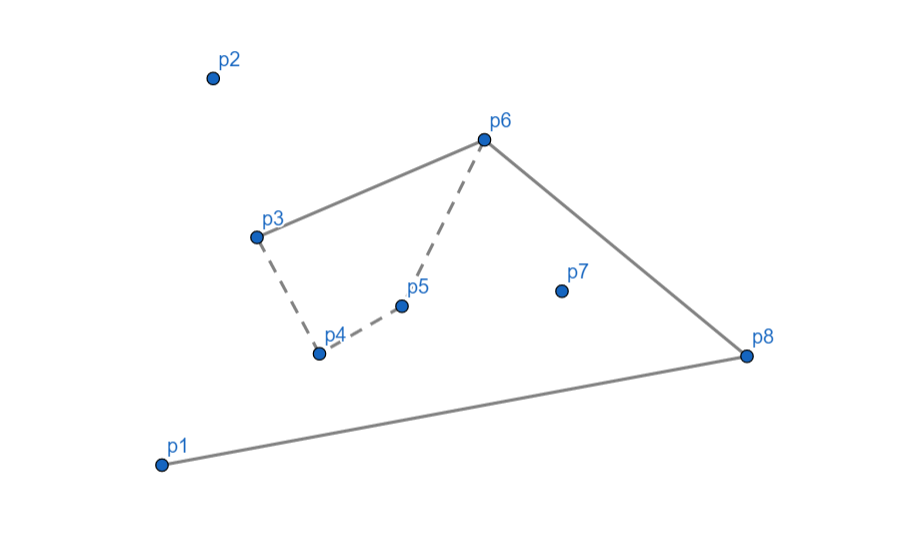
首先将 $p_1$ 入栈。
然后也将 $p_2$ 入栈,$p_2$ 可能在,也可能不在,等着之后判断。
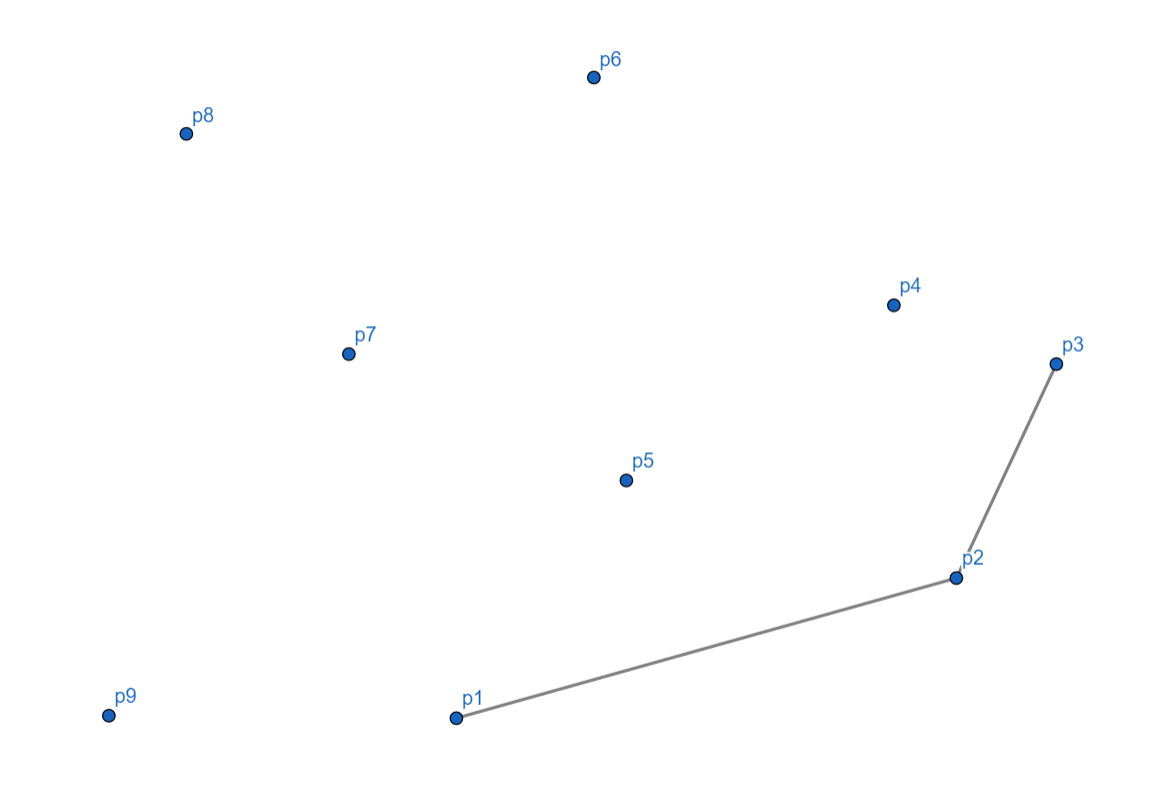
随后,发现 $p_3$ 偏右,所以我们将 $p_2$ 出栈。
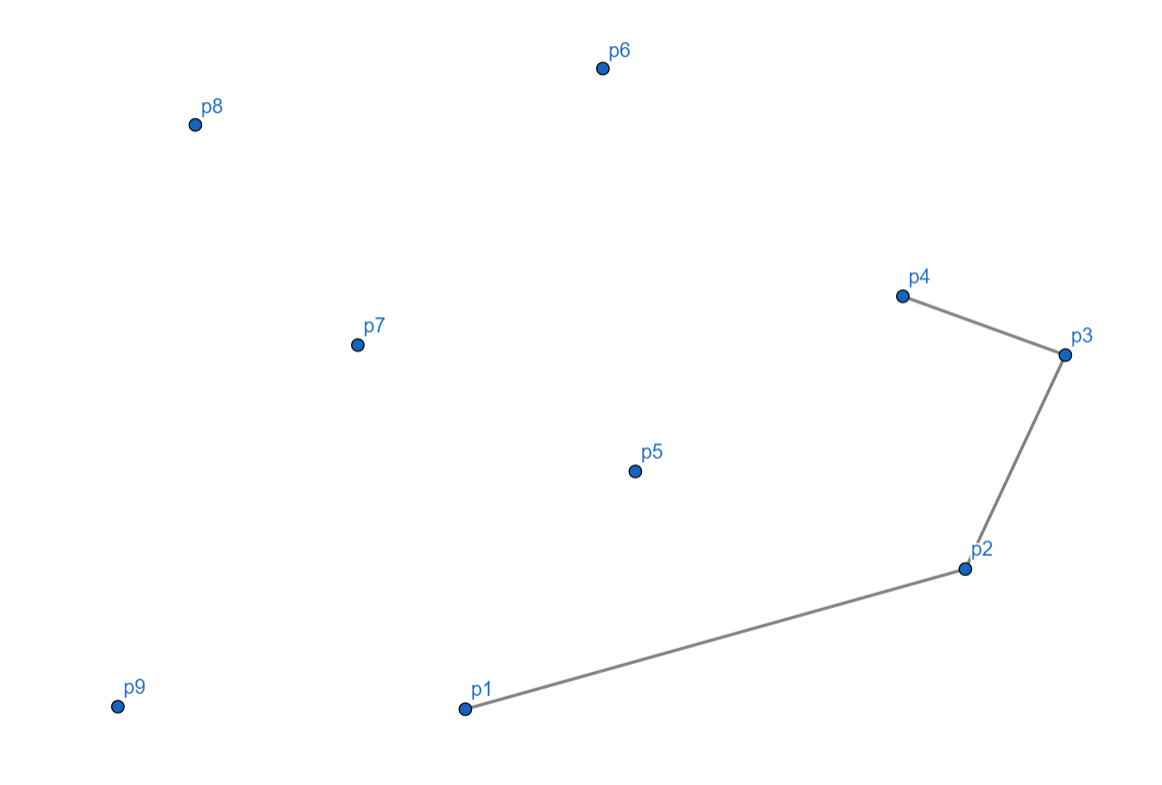
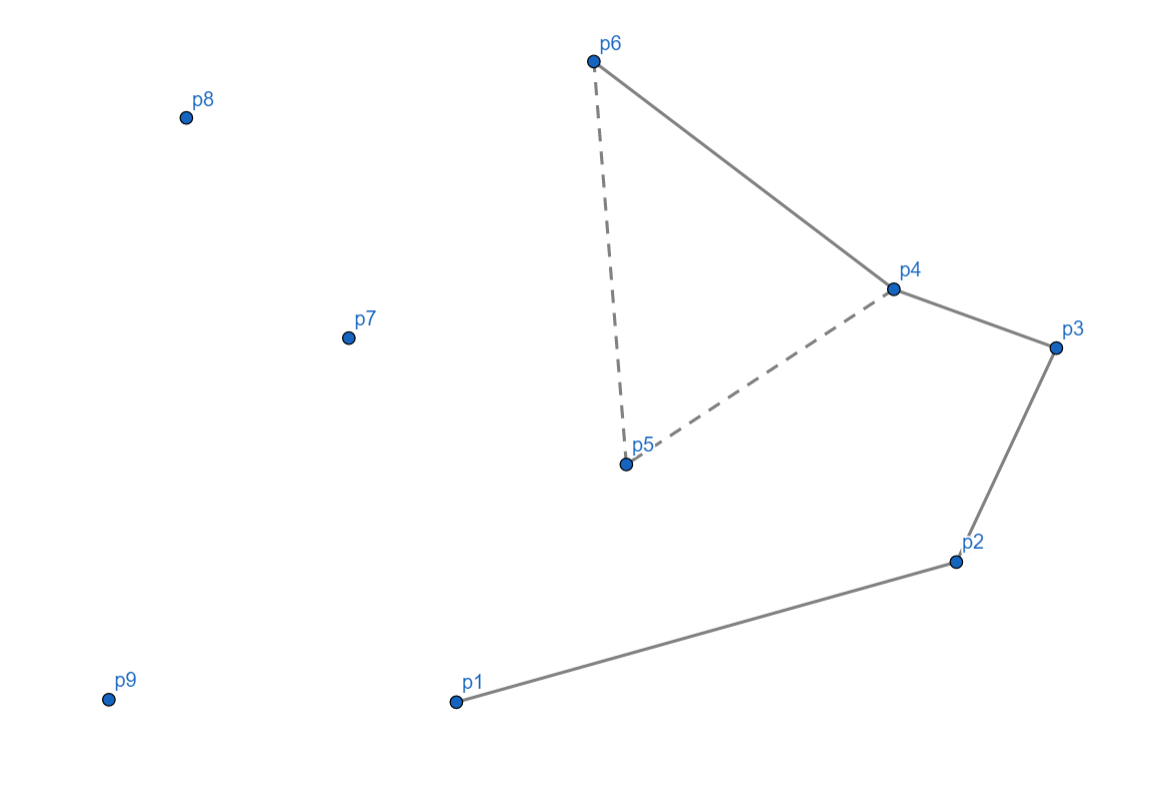
发现 $p_4$ 依然偏右,$p_3$ 出栈,$p_4$ 入栈。
$p_5$ 向右,$p_4$ 出栈,$p_5$ 入栈。
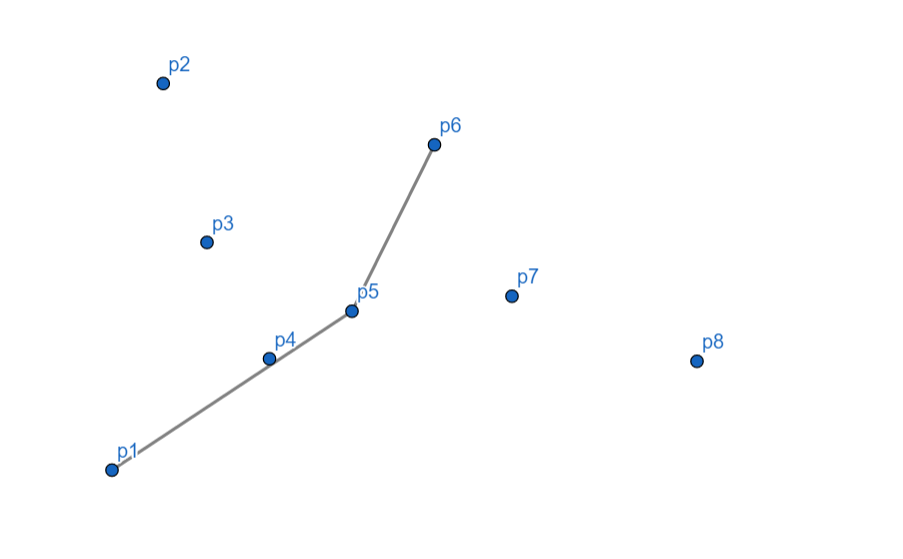
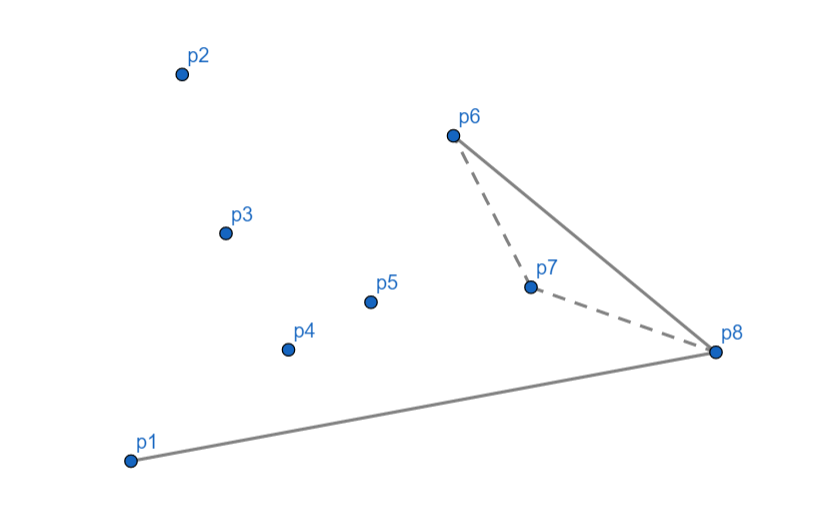
$p_6$ 向左,入栈。
$p_7$ 向右,$p_6$ 出栈,$p_7$ 入栈。
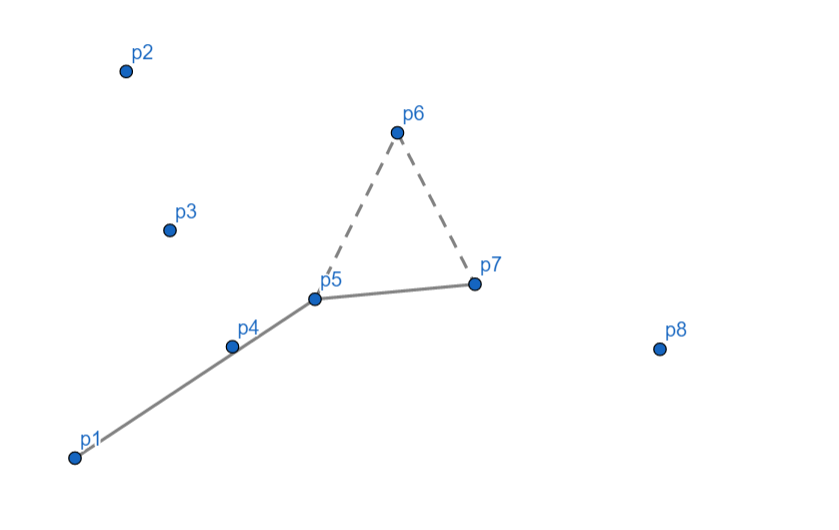
$p_8$ 向右,$p_7$ 出栈,继续检查发现相对于 $p_5$ $p_8$ 仍然向右,$p_5$ 出栈,$p_8$ 入栈。
此时,我们发现,凸包空了一半。
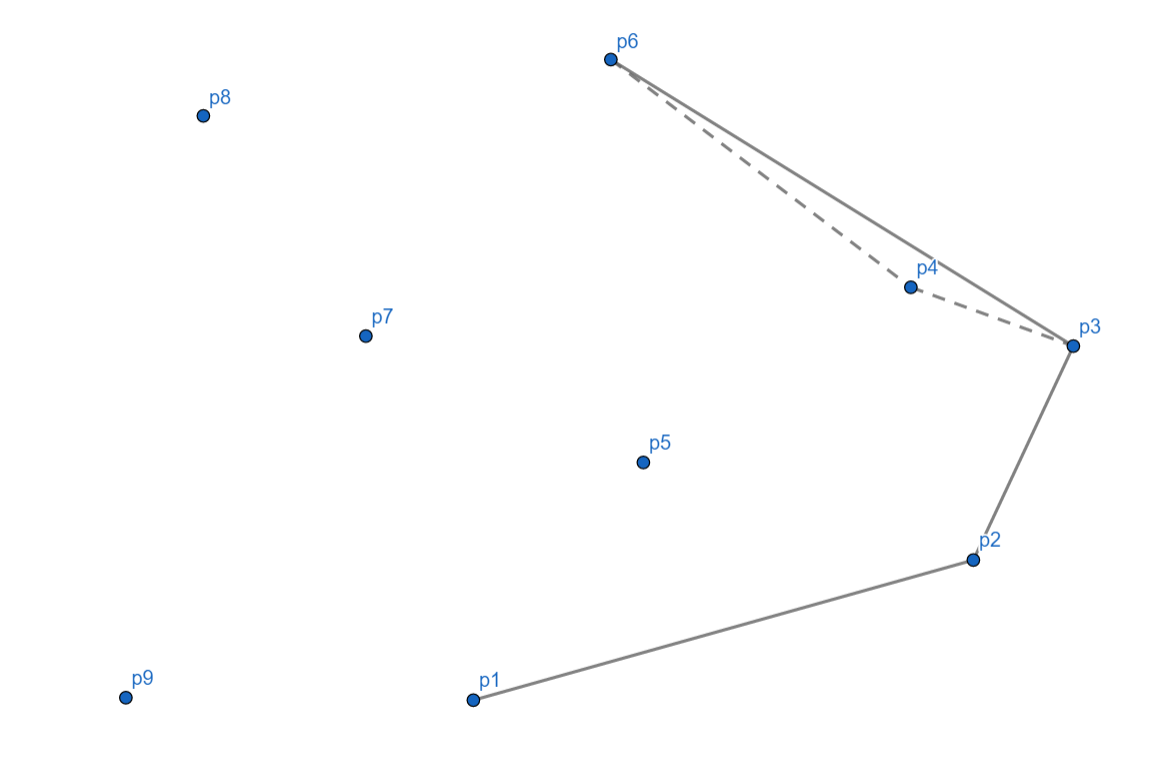
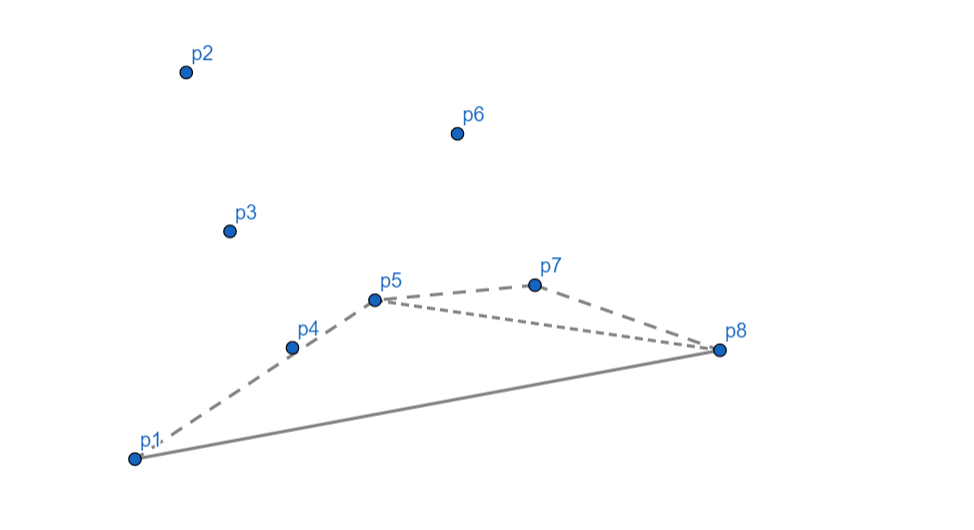
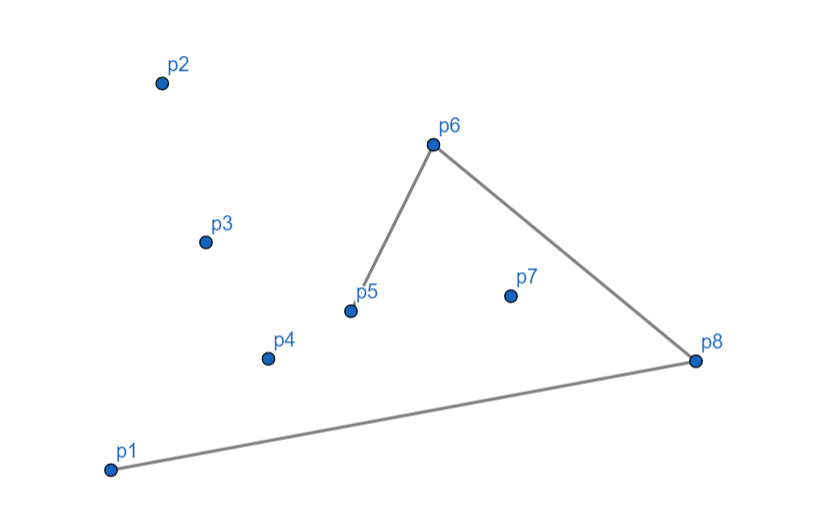
所以我们需要再从排序末尾的点(也就是 $p_8$)出发,按照一模一样的方式再算一遍就行了。
当然如果我们走过的点就不许要再走了(除了 $p_1$).
从 $p_8$ 到 $p_7$,向左,$p_7$ 入栈。
$p_6$ 向右,$p_7$ 出栈,$p_6$ 入栈。
$p_5$ 向左,入栈。
$p_4$ 向左,入栈。
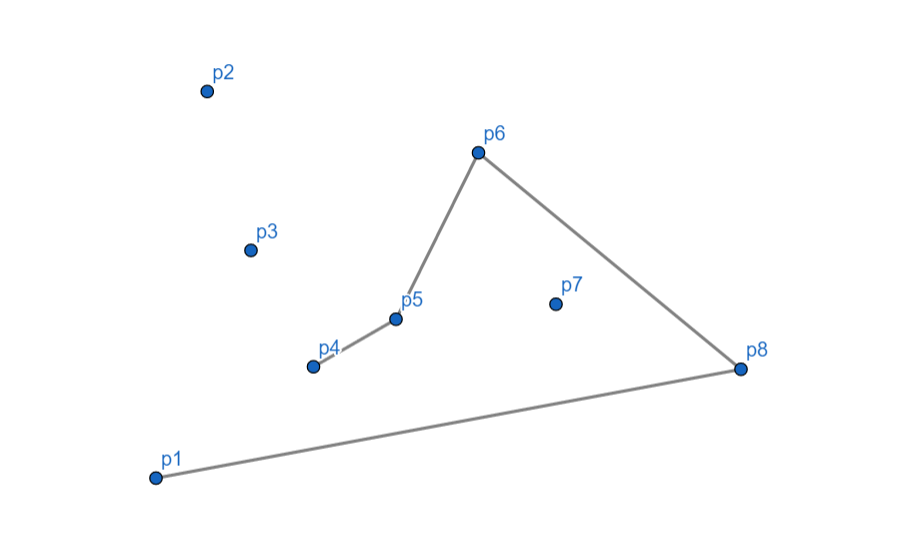
$p_3$ 向右,$p_4$ 出栈,对于 $p_5$ $p_3$ 依然向右,$p_5$ 出栈,$p_3$ 入栈。
$p_2$ 向右,$p_3$ 出栈,$p_2$ 入栈。
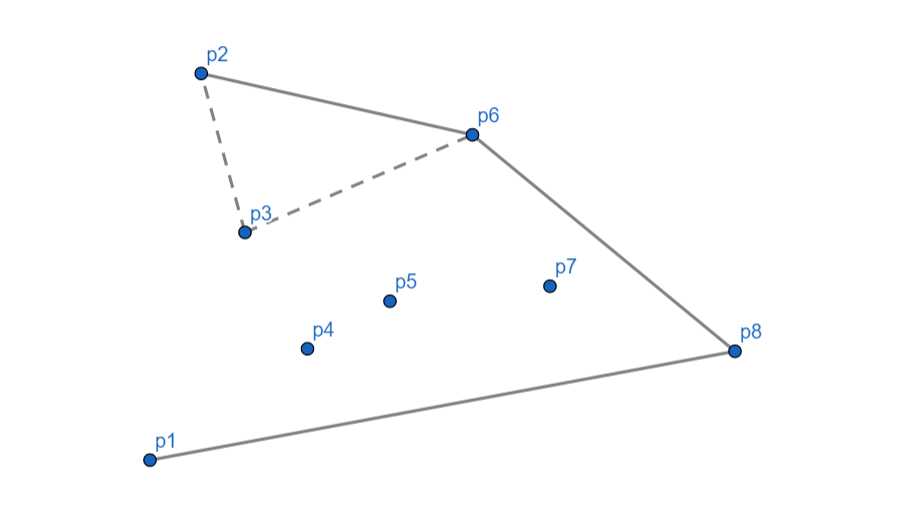
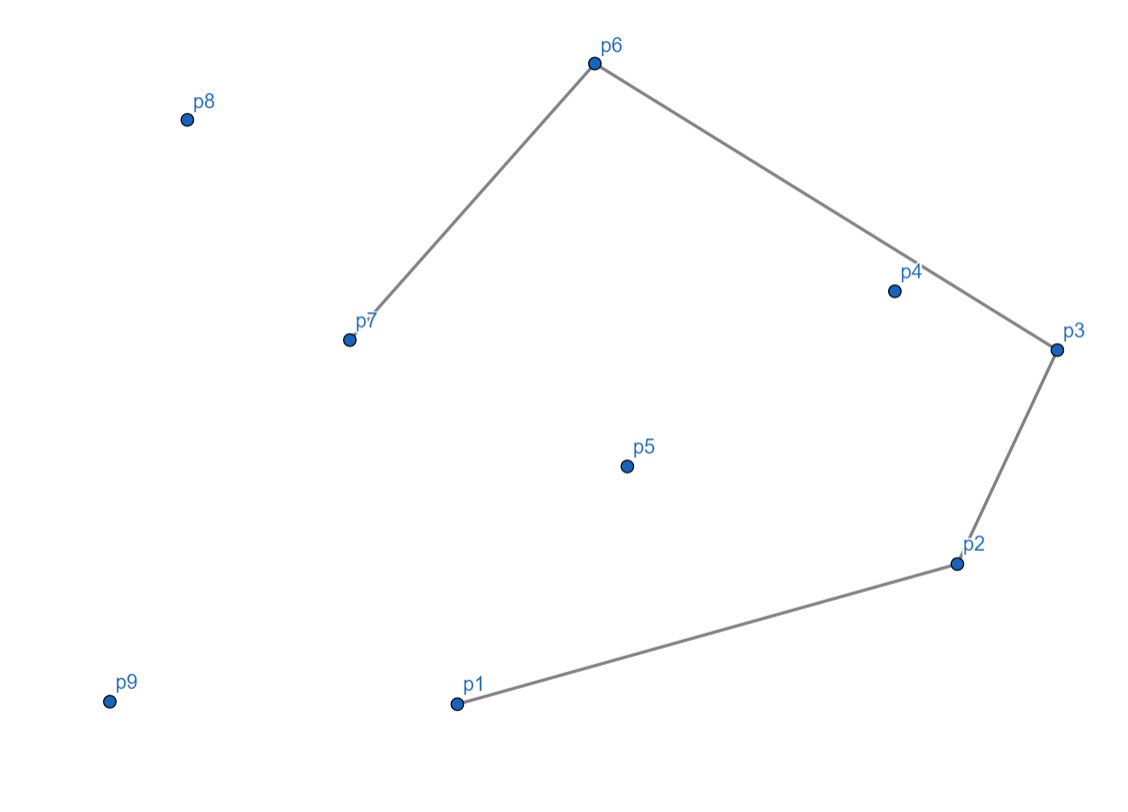
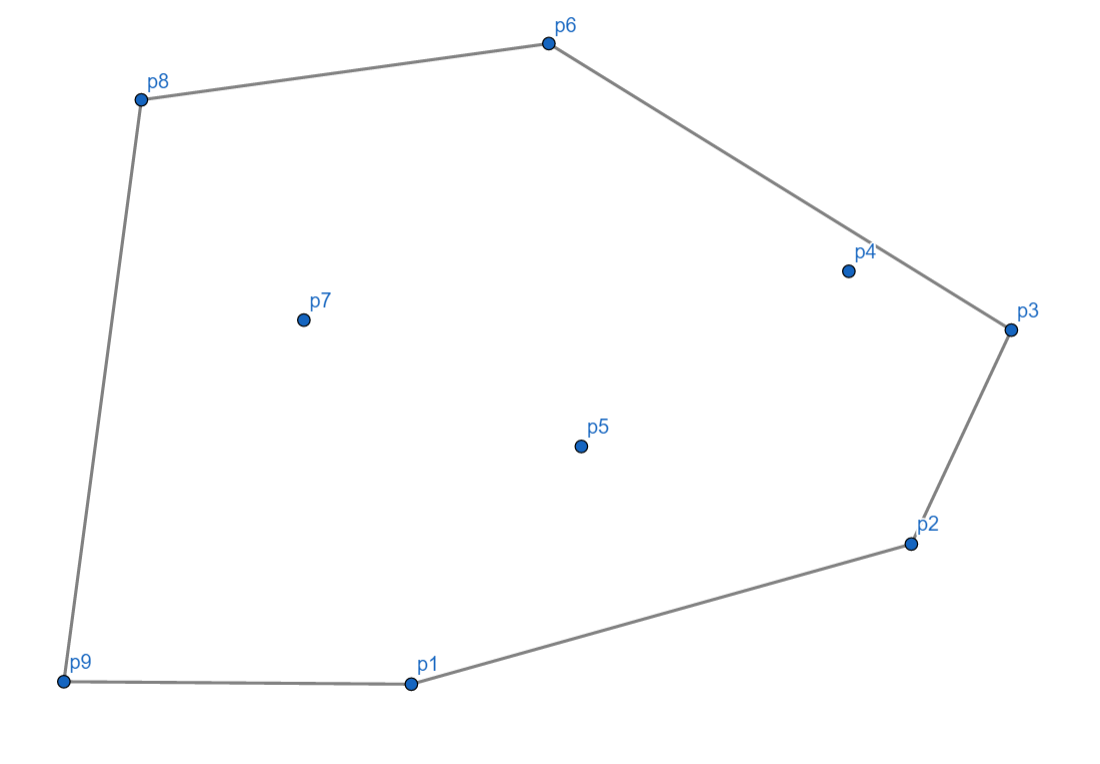
最后将 $p_2$ 和 $p_1$ 连起来。
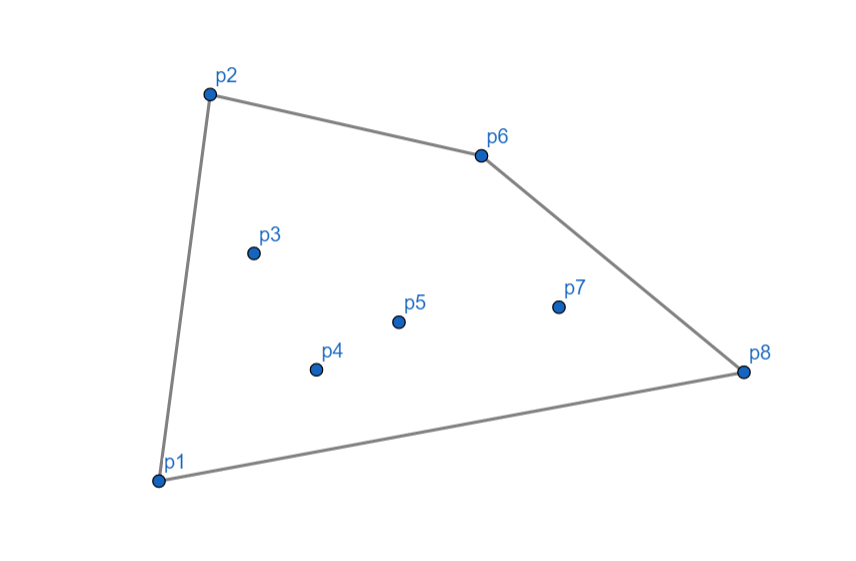
至此,我们的 Andrew 算法就完成了!
时间复杂度:$O(n \log n)
Part 3.4 实战演练
Part 3.4.1 P2742 [USACO5.1]圈奶牛Fencing the Cows /【模板】二维凸包
先拿模板题练练手。
题目简述:求一个二维凸包的周长。
拿 Graham 算法做即可。
#include<iostream>
#include<cstdio>
#include<algorithm>
#include<cstring>
#include<cmath>
#include<string>
#define line cout << endl
using namespace std;
const int NR = 1e5 + 5;
int n;
double ans;
struct point {
double x, y;
};
point p[NR], ps[NR];
double dis (point pa, point pb) { //求两点间距离
return sqrt ((pb.x - pa.x) * (pb.x - pa.x) + (pb.y - pa.y) * (pb.y - pa.y));
}
double cp (point pa1, point pa2, point pb1, point pb2) { //求叉积
return (pa2.x - pa1.x) * (pb2.y - pb1.y) - (pb2.x - pb1.x) * (pa2.y - pa1.y);
}
bool cmp (point px, point py) { //排序
double num = cp (p[1], px, p[1], py);
if (num > 0) return true;
if (num == 0 && dis (p[0], px) < dis (p[0], py)) return true;
return false;
}
int main () {
cin >> n;
for (int i = 1; i <= n; i++) {
cin >> p[i].x >> p[i].y;
if(i != 1 && p[i].y < p[1].y) { //去重
swap (p[i].y, p[1].y);
swap (p[i].x, p[1].x);
}
}
sort (p + 2, p + n + 1, cmp);
ps[1] = p[1]; //最低点是肯定在凸包里的
int h = 1;
for (int i = 2; i <= n; i++) {
while (h > 1 && cp (ps[h - 1], ps[h], ps[h], p[i]) <= 0) { //判断是向左还是向右,如果向右就出栈
h--;
}
h++;
ps[h] = p[i];
}
ps[h + 1] = p[1]; //最后一个点跟第一个点相连
for (int i = 1; i <= h; i++) {
ans += dis (ps[i], ps[i + 1]); //累加
}
printf ("%.2lf\n", ans);
return 0;
}
\color{#3498db}\footnotesize\bf[upd2021.03.19]
发现本代码被 hack 了?为什么?
我们分析,按照这种算法,那么在所有点都在一条线的时候就会出问题,无法回到起点,那么我们只需特判一下即可。
Part 3.4.2 UVA11626 Convex Hull
这题好像拿 Graham 会 TLE?拿 Andrew罢,也是道模板题。
#include<iostream>
#include<cstdio>
#include<algorithm>
#include<cstring>
#include<cmath>
#include<string>
#define line cout << endl
using namespace std;
const int NR = 1e5 + 5;
const double eps = 1e-7;
int n;
struct point {
double x, y;
point () {}
point (double a, double b) : x (a), y (b) {}
bool operator < (const point &b) const {
if (x < b.x) return 1;
if (x > b.x) return 0;
return y < b.y;
}
point operator - (const point &b) {
return point (x - b.x, y - b.y);
}
};
point p[NR], sp[NR];
int cmp (double x) {
if (fabs (x) < eps) return 0;
return x > 0 ? 1 : -1;
}
double dis (point a, point b) {
return sqrt ((a.x - b.x) * (a.x - b.x) + (a.y - b.y) * (a.y - b.y));
}
double cp (point a, point b) {
return a.x * b.y - a.y * b.x;
}
int Andrew () {
sort (p + 1, p + 1 + n);
int len = 0;
for (int i = 1; i <= n; i++) {
while (len > 1 && cmp (cp (sp[len] - sp[len - 1], p[i] - sp[len - 1])) < 0)
len--;
sp[++len] = p[i];
}
int k = len;
for (int i = n - 1; i >= 1; i--) {
while (len > k && cmp (cp (sp[len] - sp[len - 1], p[i] - sp[len - 1])) < 0)
len--;
sp[++len] = p[i];
}
return len;
}
int main () {
int t;
cin >> t;
while (t--) {
cin >> n;
char c;
for (int i = 1; i <= n; i++)
cin >> p[i].x >> p[i].y >> c;
int t = Andrew();
cout << t - 1 << endl;
for (int i = 1; i < t; i++)
printf ("%.0lf %.0lf\n", sp[i].x, sp[i].y);
}
return 0;
}
The End...